EU Fiatal TudÃģsok Versenye

TÃģszegi Zsuzsanna Mikor ÃĐs hogyan kezdett ÃĐrdeklÅdni a programozÃĄs ÃĐs a gÃĐpek irÃĄnt?
Hegyesi DonÃĄt: Gyerekkorom Ãģta foglalkoztat a gÃĐpek, robotok mÅąkÃķdÃĐse, ÃĐpÃtÃĐse, programozÃĄsa. 14 ÃĐvesen tanultam meg programozni, majd 15 ÃĐvesen ismerkedtem meg kÃķzelebbrÅl a programozhatÃģ ÃĄramkÃķrÃķkkel, azon belÞl az AVR mikroprocesszorral. Akkor egy csapÃĄsra megnyÃltak elÅttem a lehetÅsÃĐgek: megtudtam, hogy ezek az ÃĄramkÃķrÃķk kÃĐpesek szinte bÃĄrmilyen elektronikai egysÃĐget irÃĄnyÃtani, vezÃĐrelni.
TÃģszegi Zsuzsanna: Mi mindent fejlesztett az elmÚlt nÃĐhÃĄny ÃĐvben?
Hegyesi DonÃĄt: SzÃĄmos projekten vagyok tÚl, pÃĐldÃĄul: okos Ãģra, LED kocka, 3D marÃģgÃĐp. LegelsÅ projektem egy okos Ãģra volt, ami a pontos idÅ mellett mutatja az Ãģrarendemet, a buszmenetrendet, illetve feljegyzÃĐseket lehet kÃĐszÃteni benne. Ezzel a munkÃĄmmal a 2011-es <19 SzabadfogÃĄsÚ SzÃĄmÃtÃģgÃĐp Versenyen orszÃĄgos 5. helyezÃĐst ÃĐrtem el. Az ÃģrÃĄmat egy nÃĐmetorszÃĄgi versenyen is bemutathattam. A mÃĄsodik projektem egy LED kocka volt, amelyen az 512 LED-et kÞlÃķn-kÞlÃķn tudom vezÃĐrelni egy mikrokontrollerrel. A kocka alakban elhelyezett LED-ekben kÞlÃķnbÃķzÅ formÃĄkat tudok megjelenÃteni 3D-ben. KÃķvetkezÅ fejlesztÃĐsem egy 3D marÃģgÃĐp volt, amely egy puha tÃķmbbÅl szinte bÃĄrmilyen 3D-s formÃĄt ki tud marni, pÃĐldÃĄul egy emberi arcot. Ezzel a 2012-es <19 SzabadfogÃĄsÚ SzÃĄmÃtÃģgÃĐp Versenyen orszÃĄgos 4. helyezÃĐst ÃĐrtÞnk el. A munkÃĄnkat 2013-ban egy svÃĄjci versenyen is bemutathatjuk.
TÃģszegi Zsuzsanna: A programozÃĄs lett a fÅ kedvtelÃĐse, vagy mÃĄssal is szeret foglalkozni?
Hegyesi DonÃĄt: A programozÃĄson ÃĐs az elektronikÃĄn kÃvÞl van egy mÃĄsik nagy hobbim, mÃĐgpedig a pÃģkerezÃĐs. 2012. jÚlius vÃĐgÃĐn a barÃĄtaimmal pÃģkereztem, kÃķzben zsetonokkal jÃĄtszottam az asztalon. Ahogy rakosgattam a zsetonokat, Úgy talÃĄltam, hogy erre egy robotkar is kÃĐpes lenne. A pÃģkerezÅ robot megalkotÃĄsÃĄnak gondolata innen mÃĄr csak egy kis lÃĐpÃĐs volt.
Az Ãķtlet megszÞletÃĐse utÃĄn azonnal munkÃĄhoz lÃĄttam. Eredeti tervem egy alacsony kÃķltsÃĐgvetÃĐsÅą robot ÃĐpÃtÃĐse volt, viszont a roboton dolgozva egyre magasabbra ÃĐs magasabbra tettem a mÃĐrcÃĐt. AmiÃģta ezen a projekten dolgozom, tÃķbb mint egy ÃĐv alatt, Ãķsszesen 4 robotkart ÃĐpÃtettem; a tapasztalatok alapjÃĄn egyre pontosabb ÃĐs erÅsebb kart tudtam ÃĐpÃteni. Az elsÅ prototÃpus 2013 ÃĄprilisÃĄban kÃĐszÞlt el. Nem ÃĄlltam meg itt, mert az ezt kÃķvetÅ fÃĐl ÃĐvet tovÃĄbbi fejlesztÃĐsekre szÃĄntam, Ãgy 2013. szeptember vÃĐgÃĐre elkÃĐszÞlt a 2. prototÃpus is, ami precÃzebb, okosabb ÃĐs felhasznÃĄlÃģbarÃĄtabb lett.
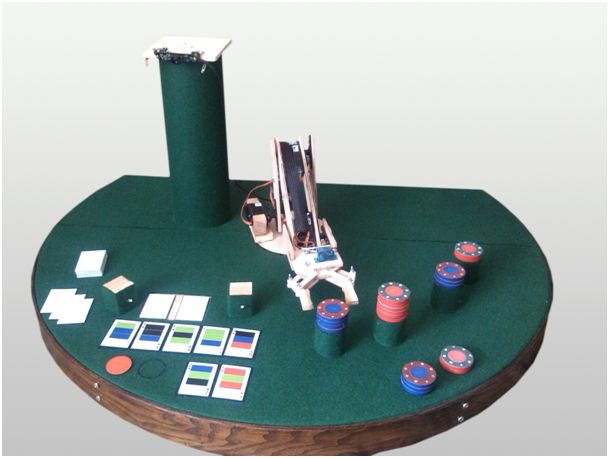
PÃģkerezÅ robot (1. prototÃpus)
TÃģszegi Zsuzsanna: Mit tudott az elsÅ prototÃpus?
Hegyesi DonÃĄt: Az elsÅ verziÃģnÃĄl a robotkar Ãķsszes elemÃĐt kÃĐzzel vÃĄgtam ki 3mm-es rÃĐtegelt lemezbÅl. A vezÃĐrlÃĐsÃĐt AVR mikrokontrollerrel oldottam meg. Az ÃĄltalam Ãrt programmal kÃķnnyedÃĐn tudom vezÃĐrelni hÃĄromdimenziÃģs koordinÃĄtarendszerben a kart. A robotkar segÃtsÃĐgÃĐvel a robot kÃĐpes mozgatni a zsetonokat (ily mÃģdon tud dobni, passzolni, megadni vagy emelni).
TÃģszegi Zsuzsanna: Ha jÃģl ÃĐrtem, ez mÃĐg csak az egyes elemek mozgatÃĄsÃĄra elegendÅ. A kÞlÃķnbÃķzÅ elemek, mintÃĄzatok felismerÃĐse ennÃĐl lÃĐnyegesen nehezebb feladat â jÃģl gondolom?
Hegyesi DonÃĄt: Igen, a pÃģkerezÃĐshez elengedhetetlenÞl fontos a kÃĄrtyÃĄk ÃĐs a zsetonok felismerÃĐse. A gÃĐpi lÃĄtÃĄson alapulÃģ felismerÃĐst talÃĄltam a legjobb megoldÃĄsnak az ember-gÃĐp kapcsolat egyik megvalÃģsÃtÃĄsÃĄra. Ennek megfelelÅen a robot kÃĐt kamerÃĄval ÃĐrzÃĐkeli az ellenfÃĐl reakciÃģit, ÃĐs a kÃĐpek elemzÃĐsÃĐvel azonosÃtja az egyes lapokat, zsetonokat. A projekthez egyedi szÃnkÃģddal ellÃĄtott lapokat, illetve zsetonokat kÃĐszÃtettem.
A robot vezÃĐrlÅegysÃĐge egy ipari szÃĄmÃtÃģgÃĐpre ÃĐpÞl. Linux operÃĄciÃģs rendszer alatt futnak a kÞlÃķnbÃķzÅ feladatok ellÃĄtÃĄsÃĄt biztosÃtÃģ programok. A kamerÃĄkbÃģl ide ÃĐrkeznek be a kÃĐpek, amelyeket a program kÃĐpes ÃĐrtelmezni.

KÃĐpelemzÃĐs (a zÃķld nÃĐgyzetekben vizsgÃĄlja a pixelek szÃneit)

ZsetonfelismerÃĐs
TÃģszegi Zsuzsanna: TehÃĄt ott tartunk, hogy a robot kÃĐpes felismerni ÃĐs mozgatni a kÃĄrtyalapokat. Az Ãn ÃĄltal kifejlesztett berendezÃĐs azonban jÃĄtszani is tud, ugye?
Hegyesi DonÃĄt: Igen, a jÃĄtÃĐkra alkalmas programot is fejlesztettem. Az ÃĄltalam megÃrt pÃģkerezÅ algoritmus a dÃķntÃĐshozatalnÃĄl figyelembe veszi a sajÃĄt ÃĐs a kÃķzÃķs lapokat, az ellenfÃĐl lÃĐpÃĐsÃĐt, a robot ÃĐs az ellenfÃĐl zsetonjainak szÃĄmÃĄt, illetve a kÃķzÃķs kasszÃĄban megtett hÃvÃĄsokat. A szÃĄmÃtÃģgÃĐp ezeknek az adatoknak az ÃķsszessÃĐgÃĐbÅl prÃģbÃĄlja meghozni a legoptimÃĄlisabb dÃķntÃĐst.

A pÃģkerezÅ robot mÃĄsodik prototÃpusa
TÃģszegi Zsuzsanna: Az elÅbb azt mondta, tÃķbb vÃĄltozatot is kifejlesztett. Mivel nem volt elÃĐgedett az elsÅ verziÃģban? Milyen irÃĄnyban folytatta a munkÃĄt?
Hegyesi DonÃĄt: Az alapkoncepciÃģn nem vÃĄltoztattam. A mÃĄsodik verziÃģval kapcsolatos cÃĐljaim: a robotkar Újra ÃĐpÃtettem a precÃzebb zsetonmozgatÃĄs ÃĐrdekÃĐben, optimÃĄlisabb dÃķntÅhozÃģ algoritmust Ãrtam ÃĐs felhasznÃĄlÃģbarÃĄtabbÃĄ tettem a robotot.
SajÃĄt elvÃĄrÃĄsaimat sikerÞlt teljesÃtenem. Az Új robotelemeket modern tervezÅprogrammal megterveztem, majd mÅąhelyben gyÃĄrtattam le a robotkart, a lehetÅ legnagyobb pontossÃĄg elÃĐrÃĐse ÃĐrdekÃĐben. A szervomotorokat erÅsebbekre, precÃzebbekre cserÃĐltem, ÃĐs speciÃĄlis szervo vezÃĐrlÅt hasznÃĄltam. Ãj grafikus programot Ãrtam a robothoz, amellyel a jÃĄtÃĐk lÃĄtvÃĄnyosabb ÃĐs szÃģrakoztatÃģbb.
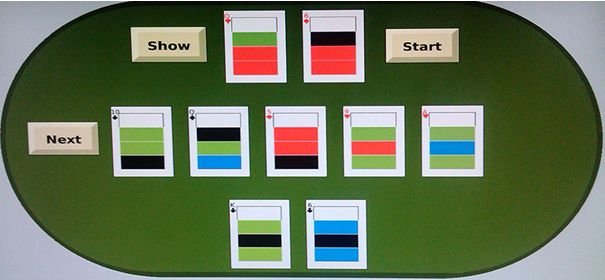
Az Új jÃĄtÃĐkfelÞlet
TÃģszegi Zsuzsanna: A tovÃĄbbiakban is tervezi a pÃģkerezÅ robot fejlesztÃĐsÃĐt, vagy Új tÃĐma felÃĐ nÃĐz?
Hegyesi DonÃĄt: A robot fejlesztÃĐsÃĐt nem hagytam abba, jelenleg a 3. prototÃpuson dolgozom, amibe be szeretnÃĐm Þltetni a mestersÃĐges intelligencia alapjait, Ãgy minÃĐl tÃķbbet jÃĄtszik majd a robot, annÃĄl âokosabbâ lesz. A vÃĐgsÅ cÃĐlom, hogy a prototÃpusbÃģl termÃĐk legyen.
Jelenleg a kaszinÃģkban olyan jÃĄtÃĐkgÃĐpek talÃĄlhatÃģak, ahol a jÃĄtÃĐkosnak kevesebb mint 50% esÃĐlye van nyerni, azÃĐrt ÃĐri meg a kaszinÃģknak Þzemeltetni azokat. A pÃģkerben viszont nincsen 100%-ig biztosan nyerÅ stratÃĐgia, ezÃĐrt gondolom, hogy egy ilyen pÃģkerezÅ robot Új szÃnt tudna vinni a kaszinÃģk ÃĐletÃĐbe.
Amint egy pÃģkerjÃĄtÃĐkos belÃĐpne a kaszinÃģba, ÃĐs meglÃĄtnÃĄ a pÃģkerezÅ robotot, azt gondolnÃĄ: ez csak egy gÃĐp, biztosan meg fogom verni. ValÃģszÃnÅąleg tÃĐvedni fog, mivel a robotnak jobb stratÃĐgiÃĄja van. Ily mÃģdon a kaszinÃģknak megÃĐrnÃĐ hasznÃĄlni ilyen gÃĐpeket, hiszen az vonzanÃĄ a pÃģkerjÃĄtÃĐkosokat. RÃĄadÃĄsul, ha a robot mÃĐgis vesztene, azzal egyÚttal nyerne is, mivel a korÃĄbbi hibÃĄjÃĄbÃģl tanulva legkÃķzelebb mÃĄr biztosan megnyernÃĐ a jÃĄtÃĐkot az ember ellen.
TÃģszegi Zsuzsanna: Aki nem ismeri a jÃĄtÃĐkot, az is hallott mÃĄr a âpÃģkerarcrÃģlâ. A gÃĐppel jÃĄtszva nincs szÞksÃĐg Ãķnfegyelemre? Azt mÃĐg nem ismeri fÃķl a robot, ha az âellenfÃĐlâ ÃķrÞl, vagy bosszankodik, ugye?
Hegyesi DonÃĄt: Ezt a funkciÃģt nem tartottam lÃĐnyegesnek, hiszen a valÃģ ÃĐletben egy pÃģkerjÃĄtÃĐkos nem mutatja ki az ÃĐrzelmeit. Ezzel szemben nagyobb hangsÚlyt fektettem az ellenfÃĐl cselekedeteinek elemzÃĐsÃĐre (passzolÃĄs, emelÃĐs, emelÃĐs mÃĐrtÃĐke, megadÃĄs stb.). EzekbÅl a lÃĐpÃĐsekbÅl sokkal tÃķbb ÃĐrtÃĐkes informÃĄciÃģ szÅąrhetÅ ki.
TÃģszegi Zsuzsanna: VÃĐgezetÞl adjuk meg az olvasÃģknak azokat a forrÃĄsokat, ahol bÅvebben lehet tÃĄjÃĐkozÃģdni a projektrÅl: a pÃģkerezÅ robot honlapja a www.pokerrobot.hu cÃmen ÃĐrhetÅ el. Az elsÅ prototÃpusrÃģl kÃĐszÞlt egy videÃģ: http://www.youtube.com/watch?v=mY-ArxNPxi8
GratulÃĄlok, ÃĐs tovÃĄbbi sok sikert kÃvÃĄnok!
Az interjÚt kÃĐszÃtette: Dr. TÃģszegi Zsuzsanna










